
|
Produktdetails:
|
| Gewicht: | 507g | ||
|---|---|---|---|
| Hervorheben: | Vielseitiger weicher Robotik-Greifer,weicher Robotik-Greifer der Lasts-1920g,soft Roboter-Greifer der Lasts-1920g |
||
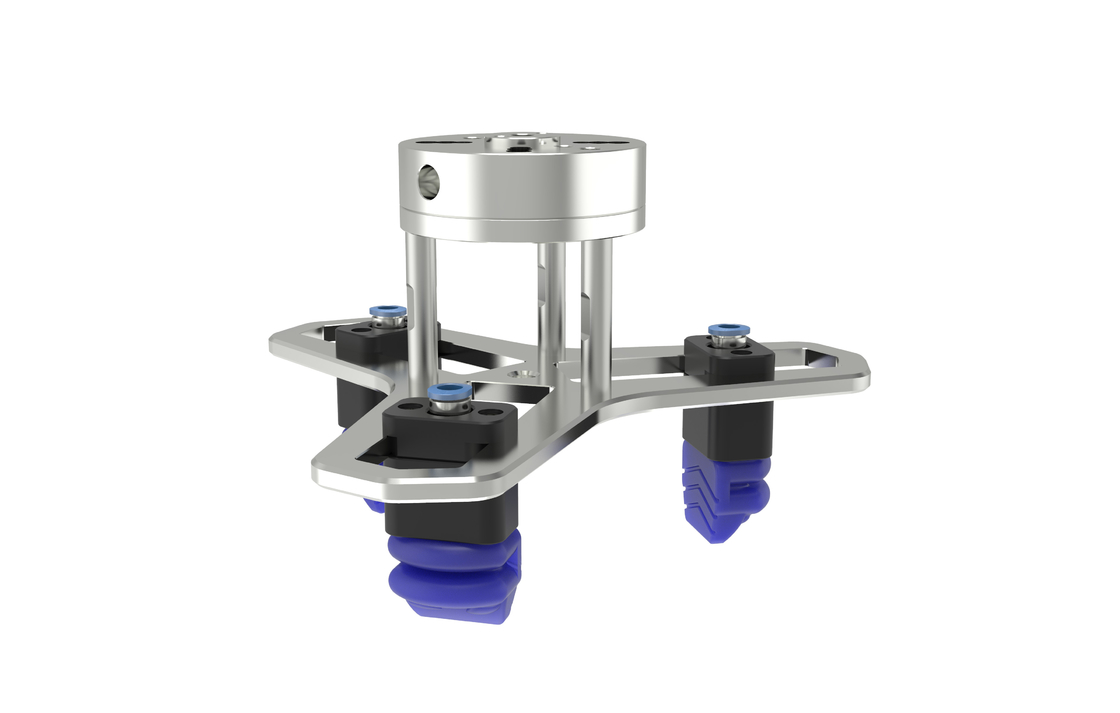
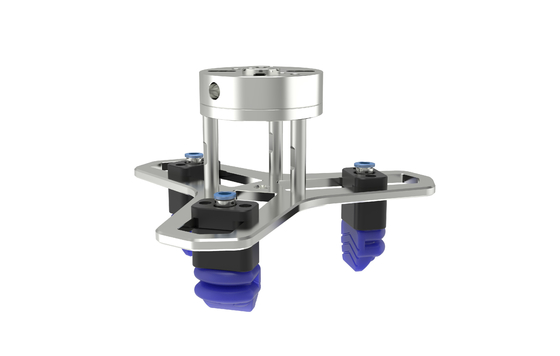
SFG-FNC3-N3025 + Vielseitigkeit + soft Roboter-Greifer
Soft Roboter-Greifer unter Verwendung der Partikel, zum von Kräften zu übertragen
Die meisten herkömmlichen flexiblen Auslöser werden durch pneumatischen oder hydrostatischen Druck gefahren und hermeticity und eine große Antriebspumpe erfordern. Während der Ergreifung wird die Greifersteifheit häufig erwartet, sich mit erhöhter Deformation zu erhöhen, die schwierig, für herkömmliche Auslöser zu erzielen ist. Dieses Papier stellt einen Weichkörperauslöser, der Partikel benutzt, um die Greifer zu fahren, keine Dichtung wird angefordert dar und der Auslöser kann gefahren werden, um unter Verwendung nur eines Kolbens zu verbiegen, um die Partikel zu drücken. In den Experimenten wenn das Volumen von den eingespritzten Partikeln geändert von 1,0mal das Anfangsvolumen des Auslösers zu 1,8mal das Anfangsvolumen, der Auslöser verbogen zu 60° mit einer fast 7fachen Zunahme der Steifheit verglichen mit dem Anfangszustand. Um die Möglichkeit dieser Methode zu überprüfen, wurde ein Weichkörpergreifer, der aus drei Weichkörperauslösern besteht entwickelt. Diese Methode stellt eine wichtige Alternative für den Entwurf und Entwicklung von flexiblen Greifern zur Verfügung.
| φb | 200 |
| Wn | 30 |
| Dn | 31-142 |
| Lbs | 68,2 |
| Lt | 62,7 |
| Ln | 44 |
| L | 25 |
| Smax | 6 |
| Ymax | 10 |
| Werkstückmaßstrecke | 31-154 |
| Last (g) | 1920 |
| Produktgewicht (g) | 507 |
| maximaler Arbeitsdruck | 100kPa |
| Produktleben | 300w |
![]()
Ansprechpartner: Miss. wang
Telefon: +8618651125686