
|
Produktdetails:
|
| Gewicht: | 158.1g | Anwendung: | Automobilindustrie, foodindustry, 3C, medizinisch |
|---|---|---|---|
| Hervorheben: | Modularer weicher Roboterfinger,Industrie 3C weicher Roboterfinger,Roboter-Finger der Industrie-3C |
||
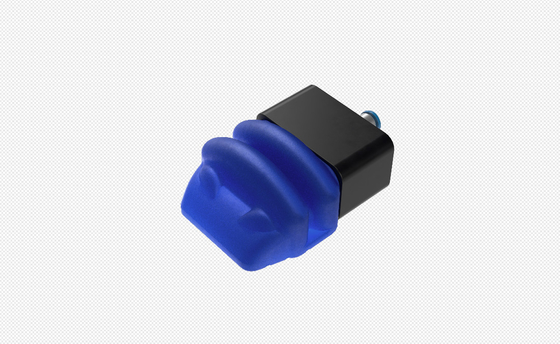
N6047 + Modularbauweise-+ soft Roboter-Finger
Soft Roboter-Finger für Gebrauch in den verschiedenen Spannvorrichtungsprodukten
Heutzutage benutzen die meisten Handyprodukte Poliermetallkästen, um das classiness des Produktes zu erhöhen. Traditionelle Greifer können Defekte auf dem Fall des Telefons leicht lassen und das Produkt veranlassen ausrangiert zu werden.
Das SRT benutzt einen soft Roboter-Finger, um die Handyeinfassung zu greifen und zu reparieren, die eine perfekte Lösung zu diesem Problem ist. Gleichzeitig nimmt der soft Roboter-Finger eine Modularbauweise an und kann in verschiedene schmelzende Produkte deshalb tadellos integriert werden, um verschiedene flexible ergreifende Aufgaben abzuschließen.
| W/mm | 60 | |
| L/mm | 47 | |
| Ln/mm | 77,7 | |
| T/mm | 35,2 | |
| X/mm | 0 | |
| A/mm | 53,5 | |
| B/mm | 30,5 | |
| Smax/mm | 18 | |
| Ymax/mm | 24 | |
| weight/g | 158,1 | |
| Fingerspitze thrust/N | 26 | |
| Lastskoeffizient einzelnes finger/g | Vertikale | 750 |
| Satz | 1600 | |
| Arbeitsgeschwindigkeit/Cpm | <110> | |
| Produktleben/-kampf | >300W | |
| Funktionsdruck | -60~100kPa | |
| Verbindungsdurchmesser | 6mm | |
![]()
Ansprechpartner: Miss. wang
Telefon: +8618651125686